CutiPy-Installing MicroPython Firmware
Contents
THIS PAGE IS CURRENTLY UNDER CONSTRUCTION
Necessary equipment
-
CutiPy
-
1 Micro-USB cable
-
A pair of needle nose pliers for wire jumper re-positioning
-
A personal computer (Windows or Linux)
-
EMAC's latest MicroPython firmware release
Windows Users
-
With the USB disconnected and power removed, carefully use a pair of needle nose pliers to shift jumper JB2 upwards from FLS to to RXM (The BT0 and RXM pins will now be linked).
-
Connect your CutiPy to your PC using the Micro-USB cable.
-
Download and install Zadig
-
Open Zadig and select STM32 BOOTLOADER and WinUSB
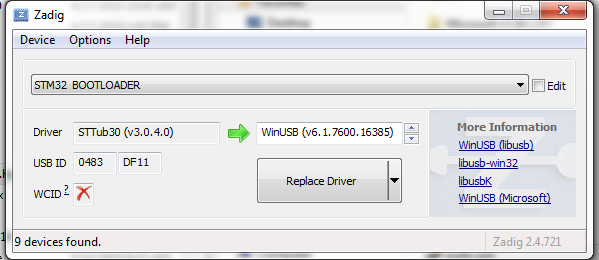
-
Click Replace Driver
NOTE Upon clicking “Replace Driver” the app may read “Not Responding” for a short duration and then recover. This is normal.
-
After successfully installing the WinUSB driver, download the latest dfu-util application zip file here.
-
Extract the zip file.
-
For convenience, save the CutiPy firmware dfu file to the dfu-util folder.
-
Open the Windows Command Prompt by searching and selecting "Command Prompt" from the Windows start menu.
-
From the Command Prompt navigate to the dfu-util directory. If necessary switch drives by entering 'drive_name:. For example to switch to the C drive enter c:. Use dir to list sub-directories and use cd directory_name to navigate to a subdirectory.
-
Once in the dfu-util directory enter dfu-util -l. Something similar to the following should be displayed:
-
From this directory install the firmware to the device by entering the following into the Command Prompt:
Something similar to the following should be displayed.
The firmware is now installed. -
Safely eject and disconnect the USB, shift the JB2 pin jumper back to the original location (BT0 and FLS should now be joined). Now reconnnect the MicroUSB cable.
Installation is now complete complete.

If desired, please enter a name for this project, otherwise press Enter to use the default: hello_emac
-- Creating new project directory...
-- Creating new source file...
-- Building custom CMakeLists.txt file...
-- Done.
Do you want to create a build directory for this project? (y/n) y
-- Creating build directory...
Do you want to run cmake for this project? (y/n) y
-- Using system compiler
-- The C compiler identification is GNU 4.8.2
-- The CXX compiler identification is GNU 4.8.2
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Configuring done
-- Generating done
-- Build files have been written to: /home/developer/projects/hello_emac/hello_emac-build
Do you want to compile this project? (y/n) y
Scanning dependencies of target hello_emac
[100%] Building C object CMakeFiles/hello_emac.dir/hello.c.o
Linking C executable hello_emac
[100%] Built target hello_emac
Linux Users
Follow the EMAC DFU instructions given here